One source → every target — proved, simulated, and (where it exists) measured.
Each card below was produced by one command (make all) from a single EML
source. From that one source Forge emits every target it can — general-purpose software,
GPU shaders, LLVM IR, machine-checked proofs (Lean / Coq / Isabelle), safety-critical
(Ada / SPARK, AUTOSAR, AADL, ROS2), a smart contract, a zk circuit, and — for the RC
filter, which is an actual circuit — a SPICE netlist, a KiCad schematic, and a JLCPCB fab bundle.
Alongside the code sits a contract proof whose axiom footprint is clean of sorryAx, a
simulation whose measured quantity satisfies the proved bound, and links to the raw evidence.
This page is a generated view of that evidence — nothing is hand-authored; a proof that
weren't clean, or a sim check that didn't hold, would show in red. (FPGA RTL — Verilog/VHDL/Chisel —
is honestly absent: it needs an @target(fpga) clock annotation these scalar
sources don't carry. The tool skips what it can't emit rather than fake it.)
Reproduction tiers: LOCAL
one command, no heavy toolchain · TOOLCHAIN re-derive with
Lean / Vivado · REPLAY captured on real hardware, replayed from
evidence. 4 controllers · 119 target emissions from 4 sources · 2 with
real-hardware evidence.
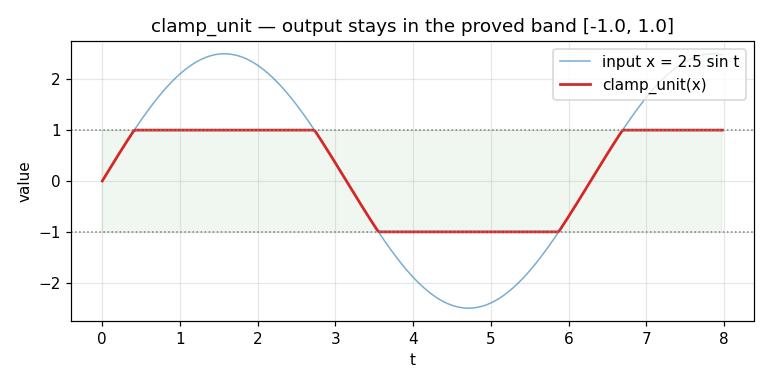
The same claim, two ways. The theorem clamp_in_unit_interval proves clamp_unit(x) is always within [-1, 1] for every input x; the sim shows 1.0 ≤ 1.0 (clamp band [-1.0, 1.0]).
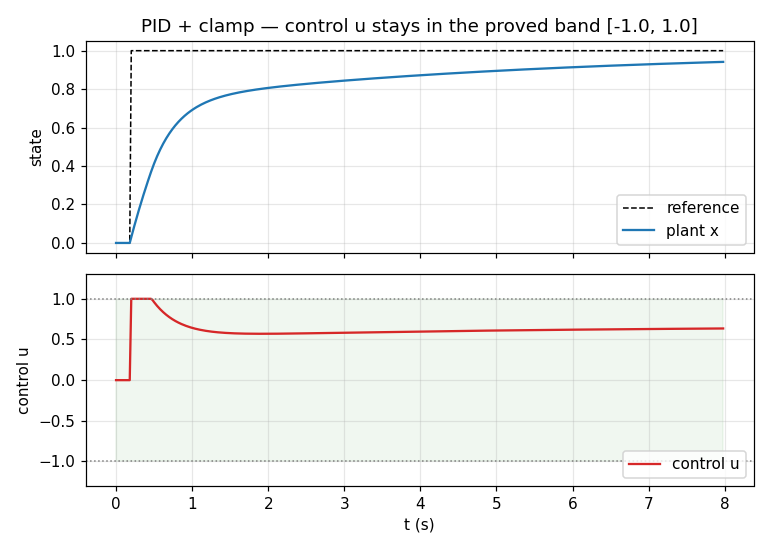
The same claim, three ways. The theorem pid_output_clamped proves the control output is always within the actuator band [OUT_MIN, OUT_MAX] = [-1, 1]; the sim shows 1.0 ≤ 1.0 (actuator band [-1.0, 1.0]); and the same behavior was measured on real hardware.
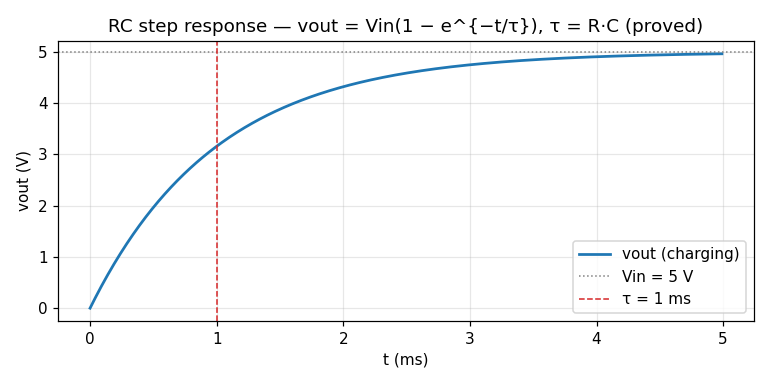
The same claim, three ways. The theorem rc_time_constant_def proves the filter time constant is exactly τ = R·C; the sim shows 0.0068 ≤ 0.01 (settles to Vin within 5τ); and the same behavior was measured on real hardware.
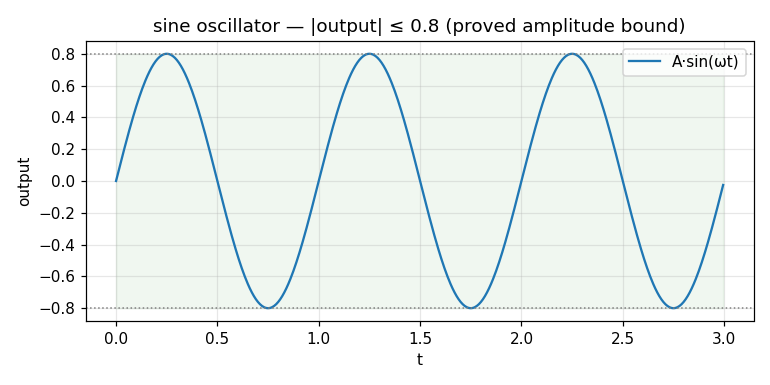
The same claim, two ways. The theorem sine_oscillator_amplitude_bound proves |A·sin(ωt)| ≤ A for A ∈ [0,1], ω ∈ [0, 1e4], t ≥ 0; the sim shows 0.8 ≤ 0.8 (amplitude bound |·| ≤ 0.8).